(G. Tomasi di Lampedusa, Il Gattopardo)
- posta@leonardobandini.it
- skype: leobandini
Per info sulla modellazione di dispositivi di dissipazione supplementare di energia con SAP2000 inviare una mail, oppure un messaggio mediante la sezione "Contatta" presente nel sito.
Abstract
Nel presente articolo viene proposta la modellazione di una particolare tipologia di dispositivi fluido – viscosi (fig. 1), operata tramite i codici SAP2000 sulla base di indicazioni sperimentali presenti in letteratura Sorace S., Terenzi G. (1999). Viene altresì presentata la metodologia di modellazione di un dispositivo di tipo elastomerico.
Modellazione di un dispositivo FV del tipo Jarret
Il dispositivo fluido viscoso a cui viene fatto riferimento nel presente articolo, altresì mostrato in spaccato assonometrico in fig. 1, ha capacità dissipative basate sul refluimento di un particolare fluido comprimibile all’interno di un serbatoio di forma geometrica compatta, caratterizzato da un’alta stabilità ciclica e da un’alta capacità di carico esso ha un comportamento dinamico di questo dispositivo è ben rappresentabile attraverso un classico modello Kelvin – Voigt, costituito da un sistema in parallelo di una molla elastica e di un dissipatore.
Il comportamento elastico è rappresentabile attraverso una bilatera caratterizzata da dei valori di rigidezza K1, K2, rispettivamente al di sotto ed al di sopra della soglia di precarico imposta al materiale in fase costruttiva.
L’equazione di moto di un sistema SDOF soggetto ad una forzante dinamica f(t) con una massa m connesso ad un dispositivo FV è pertanto del tipo:
[3.1]
![]()
dove ![]() è la risposta in accelerazione, Fd
rappresenta la componente di forza viscosa di seguito
definita:
è la risposta in accelerazione, Fd
rappresenta la componente di forza viscosa di seguito
definita:
[3.2]
![]()
dove
c = coefficiente di smorzamento,
sgn(·) = funzione di segno,
a è un coefficiente frazionario (minore 1)
mentre Fe indica la componente elastica di seguito definita:
[3.3]
dove
F0 è la forza di precarico,
R è un coefficiente intero (da assumere preferibilmente uguale a 5, come è emerso da prove sperimentali su tali dispositivi e riportate in letteratura [4]
La presenza del precarico determina il ritorno del pistone interno nella posizione iniziale al termine dell’azione. Si osserva che la presenza del precarico è stata riprodotta mediante un procedimento descritto nel par. 5.
I dispositivi assunti hanno
un comportamento a singolo effetto (SA – Single action) ovvero
operanti a
semplice compressione.
Per far funzionare il dispositivo solo in compressione si è dovuto ricorrere ad una composizione di NLLINK in serie ed in parallelo, secondo lo schema riportato in fig. 3.2.
Ke indica la rigidezza della fase elastica, c e a sono i parametri caratterizzanti le proprietà viscose, d0 rappresenta la deformazione indotta dalla pretensione, d1 la corsa massima del dispositivo, Kr la rigidezza della molla di ritorno a bassa rigidezza (posta per garantire il recupero deformativi dello smorzatore di modello), K¥ caratterizza infine un elemento infinitamente rigido.Lo schema di modellazione riportato nella fig. 3.2 è valido con l'utilizzo di una versione di SAP più vecchia della V8.0.1. A partire da questa versione, infatti, è disponibile un elemento elastico multilineare che posizionato come in schema di fig.3.3 (elemento indicato con Ke) semplifica il modello.
L'elemento NLLINK Multilinear Elastic è un elemento la cui legge elastica può essere fissata per punti (quindi lineare a tratti). Tale legge elastica sarà seguita sia durante la fase di carico che durante la fase di scarico.
L'elemento Multilenar elastic risulta ideale per la modellazione della legge leastica deidispositivi SFV, si veda a tal proposito la relazione 3.3 e la fig. 3.1 dove è distinguibile una legge elastica bilineare priva di isteresi.
Naturalmente tale legge "bilineare" può essere definita anche come curva (equazione di grado n) passandola per punti.
Successivamente verrà descritto questo tipo di assemblato.
Fig. 3.3: schema elemento Siliconico Fluido Viscoso
Ciclo isteretico dell'assemblato
Gli elementi presenti nell'assemblato, tutti appartenenti alla libreria presente in SAP2000 (V8 e V9) sono:
1) Elemento Damper: elemento viscoso non lineare rispondente alla legge 3.2. In questo elemento vengono passate come uniche grandezze non nulle: C - coefficiente viscoso, alfa - scalare esponente di norma [0.15-0.25]
2) Elemento GAP: elemento solo compresso con apertura in serie. In questo elemento vengono passate come uniche grandezze non nulle: Knl - costante di rigidezza non lineare che si attiva all'esaurimento dell'apertura, fissata molto alta per simulare il fine corsa del dispositivo, delta1: corsa del dispositivo (il doppio della corsa se soggetto a precarico).
3) Elemento Hook: elemento solo teso con apertura in serie. In questo elemento vengono passate come uniche grandezze non nulle: Knl - costante di rigidezza non lineare che si attiva all'esaurimento dell'apertura, fissata molto alta per simulare il fine corsa del dispositivo, delta1: corsa del dispositivo (il doppio della corsa se soggetto a precarico).
4) Elemento N-lineare: elemento multilineare elastico (esempio bilatera vista in precedenza).
Sottoponendo l'assemblato a cicli di spostamento (4/5 della corsa max del dispositivo) in condizioni di assenza di precarico si ottiene il seguente ciclo isteretico:
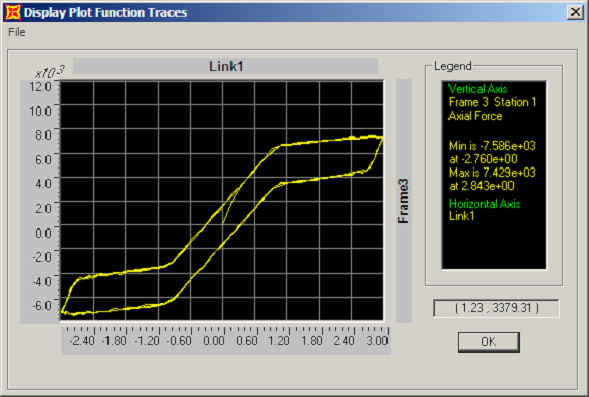
Fig. 3.4: ciclo isteretico di un dispositivo doppio effetto.
volendo assegnare le caratteristiche di singolo effetto e dotando il dispositivo di un precarico iniziale si ootiene:
Fig. 3.5: ciclo isteretico di un dispositivo singolo effetto.
Si noti come nella figura 3.5 si percorra un unico ramo della bilatera di legge elastica Si noti anche la posizione iniziale dovuta al precarico ed al montaggio.
Dispositivi elastomerici
Si voglia adesso modellare dispositivi elastomerici, questi, come è noto hanno un comportamento schematizzabile con una legge bilatera elastica con scarico elastico (con isteresi descritta nel modello WEN).
Questi elementi sono già compresi nella libreria di SAP2000.
Una difficoltà possibile è quella di voler modellare la fase iperelastica (aumento della rigidezza) che si manifesta a partire da una certa deformazione raggiunta (di norma superiore 100% dell'altezza).
Per modellare la fase iperelastica, è stato scelto dall'autore, di utilizzare un elemento NLLINK di tipo GAP insieme ad uno di tipo Hook montati in parallelo.
Fig. 3.6: assemblato per la modellazione di un dispositivo elastomertico.
Il ciclo isteretico ottenuto risulta essere quello riportato nella fig. 3.7, nella quale è evidente la fase iperelastica.
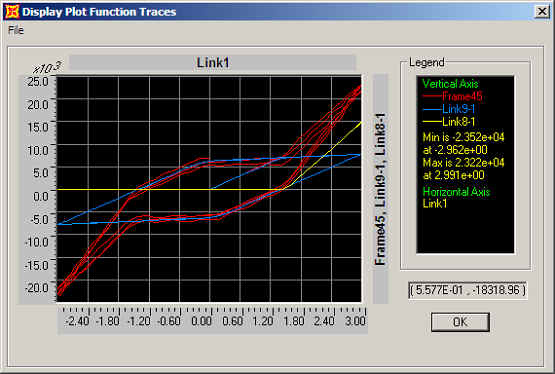
Fig. 3.7: ciclo isteretico di un dispositivo elastomerico soggetto ad un ciclo di spostamenti sinusoidali con ampiezza pari a 150% dell'altezza.
BIBLIOGRAFIA
[1] Bandini, L., Dispense al Corso di formazione post-laurea "Esperto in tecnologie avanzate di protezione sismica degli edifici", Coord. prof. Stefano Sorace.
[2] Bandini, L., Fani, A., Tesi, Università degli Studi di Firenze, “Modellazione e progettazione ottimale di dispositivi ADAS e siliconici in controventi dissipativi di strutture in acciaio”.
[3] Terenzi, G., Tesi di Dottorato, Università degli Studi di Roma,“Effetti dissipativi nell’isolamento sismico”.
[4] Sorace, S., Terenzi. G., "Design assessment of fluid viscous dampers for base-isolation systems", submitted for publication in the ASCE Journal of Structural Engineering, January 2000.
AA.VV., “CSi Analysis References Manual for SAP2000, ETABS and SAFE” , Csi – Computer and Structures, Inc, Berkeley California USA.
CONTATTI
Ing. Leonardo Bandini
Consulenza di modellazione strutturale, analisi non lineari di strutture isolate alla base o dotate di dispositivi di dissipazione supplementare di energia..
Ing. Leonardo Bandini

