(G. Tomasi di Lampedusa, Il Gattopardo)
Nota del LUGLIO 2009:
Ulteriori approfondimenti sull'analisi Pushover e l'analisi Dinamica Non Lineare possono essere trovati nel documento: Pushover_NTC2008_OPCM3274_Udine III.pdfTale documento riporta le dispense della lezione del 26 febbraio 2009 tenuta al CISM Udine.
Sommario
Verrà presentato il metodo della analisi statica non lineare descritto nella OPCM 3274 del 2003.
Il metodo proposto, in quella che viene definita "nuova normativa sismica" è un metodo presente in letteratura sotto il nome di metodo Pushover. Il metodo Pushover, o "Spingi-oltre" consiste nell'applicare alcune distribuzioni di forze via via crescenti sulla struttura, in modo da studiare la sua risposta in termini elastoplastici. Tale risposta pertanto, deve essere ottenuta, mediante una analisi non lineare tenendo conto sia gli effetti di non linearità del materiale (formazioni di cerniere plastiche, svergolamenti di elementi compressi, snervamento di elementi in trazione) sia effetti di secondo ordine (quindi non linearità di tipo geometrico) qualora esse assumano un valore non trascurabile.
La limitazione maggiore di questo metodo, sta proprio nella scelta delle distribuzioni di forze da applicare alla struttura. Difatti, scelto un tagliante alla base sufficientemente elevato (si tornerà successivamente su questo punto) lo si ripartisce in altezza con delle distribuzioni (almeno due) arbitrarie. Questo concettualmente non è diverso da quanto eseguito per il metodo della statica lineare (ex "statica equivalente"). Pertanto, anche il metodo della statica nonlineare risulta limitato alle sole strutture regolari (ai sensi della ordinanza stessa). L'analisi Dinamica lineare, così come descritta dalla normativa stessa, risulta di fatto una analisi di risposta in spettro associata ad una analisi modale. In tale analisi la limitazione alle strutture regolari, viene by-passata proprio dalla scelta di distribuzioni di forza derivanti dalla analisi modale stessa (forme modali). Sarebbe pertanto auspicabile estendere il metodo della analisi statica non lineare anche a strutture non regolari, magari sfruttando proprio le distribuzioni di forze derivanti dalle forme modali.
Il metodo proposto consta nella ricerca di una curva "adattiva" Forza-Spostamento, la quale avrà un andamento non necessariamente monotonico. Sulla base di questa curva, si ricaverà una curva equivalente di un sistema elastoplastico ad 1 grado di libertà (SDOF ELASTOPLASTICO EQUIVALENTE), la quale sarà utile per la determinazione della richiesta di spostamento (o richiesta di duttilità) della struttura, parametro essenziale per questa verifica. Infatti, questa metodologia di analisi consiste nel verificare non dei valori di sollecitazione, ma si effettua definendo degli stati limite direttamente sulla curva di pushover.
SCOPO DELL’ANALISI PUSHOVER:
-
VALUTARE I RAPPORTI DI SOVRARESISTENZA aU/ a1
-
VERIFICARE L’EFFETTIVA DOMANDA ANELASTICA DEGLI EDIFICI
-
VALUTAZIONE DELLA CAPACITA’ DEGLI EDIFICI
SINOTTICO DELLA PROCEDURA DI PUSHOVER:
figura 1: Sinottico della procedura di Pushover secondo O.P.C.M. 3274
INDIVIDUAZIONE DEGLI STATI LIMITE SULLA CURVA DI PUSHOVER:
Si riporta di seguito il classico andamento di una curva Forza - Spostamento. Su questa curva, valida sia a livello globale della struttura sia in un punto specifico di essa, si possono individuare gli stati limite di controllo.
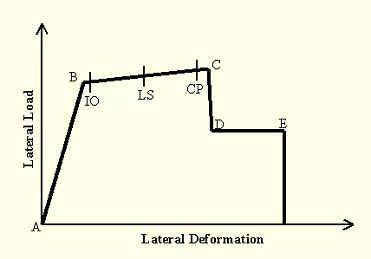
figura 2: comportamento deformativo della struttura
-
il punto B evidenzia l'abbandono della fase elastica, e la comparsa del primo meccanismo plastico (cerniera plastica a momento/taglio o effetti combinati PMM, svergolamento di un elemento compresso, snervamento per trazione, ecc)
-
il punto IO evidenzia il raggiungimento del primo stato limite denominato Immidiate Occupancy (rioccupazione immediata), superato il quale si ha un danneggiamento basso, ma comunque tale da rendere necessario un intervento di ripristino locale per la rioccupazione dell'edificio.
-
il punto LS evidenzia il raggiungimento del secondo stato limite denominato Life Safety (Salvataggio della vita), superato il quale si ha un danneggiamento alto, e non si ha la certezza del salvataggio delle vite degli occupanti dell'edificio.
-
il punto CP evidenzia il raggiungimento dell'ultimo stato limite denominato Collapse Prevention (Prevenzione del Collasso). Questo livello segna un danneggiamento molto pronunciato prossimo a quello di Collaso (individuato dal punto C).
Si fa notare che il collasso individuato dal punto C, risulta un Collasso in termini di forza orizzontale, cioè le membrature della struttura sono così danneggiate da non portare più forze orizzontali, ma permane una resistenza ai carichi verticali. Il collasso vero e proprio è indicato dal punto E.
Inoltre, mentre il valore di IO e CP sono dettati da ragionamenti fisici, il valore LS è un valore di comodo scelto opportunamente tra i due precedenti.
Questa curva è valida sia a livello globale per la struttura, e in questo caso assume l'importanza della individuazione dei diversi stati limite, sia a livello locale. In tal caso, assume un valore di assegnazione dei diversi livelli di danneggiamento di quella particolare "hinge".
ESEMPIO APPLICATIVO DEL METODO PUSHOVER (esempio svolto con il codice di calcolo SAP2000 versione 8 nonLinear)
Si consideri il seguente telaio piano riportato di seguito:
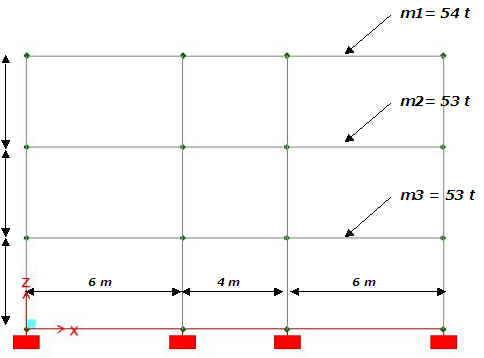
figura 3: schema del telaio considerato a titolo d'esempio
Le matrici di Rigidezza e di Massa relative a questo esempio sono:
A questo punto occorre determinare le distribuzioni di forza da utilizzare. L'ordinanza prevede l'utilizzo di 2 distribuzioni, una proporzionale alle masse l'altra proporzionale al primo modo di vibrare. Pertanto in questo caso la prima risulterà una distribuzione quasi rettangolare, taglio di piano costante, la seconda una distribuzione triangolare crescente dal basso verso l'alto.
Si fa notare che fino ad esso, si è parlato di distribuzioni di forze e non si è specificato il valore delle intensità.
Dal momento che deve essere svolta una analisi al passo, incrementando tali valori non ha senso riferirsi a dei valori precisi, piuttosto vale la pena prendere un taglio alla base molto alto (per esempio 2 o 3 volte il valore calcolato con una statica equivalente). Su questo proposito la normativa risulta chiara, l'analisi svolta è corretta se le forze massime utilizzate (ultimo passo dell'analisi) sono capaci di spostare un punto di controllo di una quantità prefissata.
Si fa notare ulteriormente che non è detto che l'ultimo passo della analisi si abbia un taglio alla base uguale a quello passato come valore limite (nell'esempio 100 KN) perché la struttura potrebbe subire un crollo precedentemente.
L'analisi si arresterà pertanto al raggiungimento dello stato limite indicato da E indipendentemente dal raggiungimento del taglio alla base prefissato.
Occorre adesso richiamare alcuni concetti presenti nella analisi modale. La massa partecipante associata al primo modo di vibrare e il primo fattore di partecipazione:
Dove F1 è il primo autovettore del sistema M1 è la massa attivata al primo modo di vibrare, R è il vettore di trascinamento e g1 è il primo fattore di partecipazione modale. Queste quantità anche se riportate in forma esplicita sono evidenziate da ogni programma di analisi a seguito di una analisi modale. Per ulteriori approfondimenti su questi concetti si rimanda all'articolo: "L'Auto Problema".
Si applica la prima distribuzione di forze (proporzionali alle masse):
figura 4: Prima distribuzione di forze di pushover considerate.
Prima di impostare l'analisi corretta è necessario assegnare le caratteristiche inelastiche della struttura. Su questo punto si possono indicare due diversi tipologie di codici di calcolo:
-
proprietà inelastiche distribuite su ogni punto della struttura (esempio programmi a fibre). In questo caso l'elemento finito è di natura elastoplastica.
-
proprietà elastoplastiche concentrate in punti prestabiliti. Questo è il caso di SAP2000 (ma anche DRAIN, IDARC e la maggior parte dei codici di calcolo) nel quale l'elemento finito è elastico con in serie uno o più nodi con caratteristiche elasto plastiche.
Anche se è possibile (almeno nel codice di calcolo SAP2000) assegnare un numero indefinito di "zone" inelastiche, nell'esempio presentato, ed in generale in tutti gli edifici a telaio, le possibili cerniere plastiche sono localizzate all'inizio e alla fine di ogni elemento "asta" (con l'ipotesi di elementi trave e pilastri realizzati con un unico elemento finito). Pertanto, verrà passato al codice di calcolo "l'ordine" di monitorare i possibili meccanismi plastici nei nodi indicati.
Si riporta di seguito la cattura di una fase del passaggio dei punti suscettibili di formazione di un meccanismo plastico.
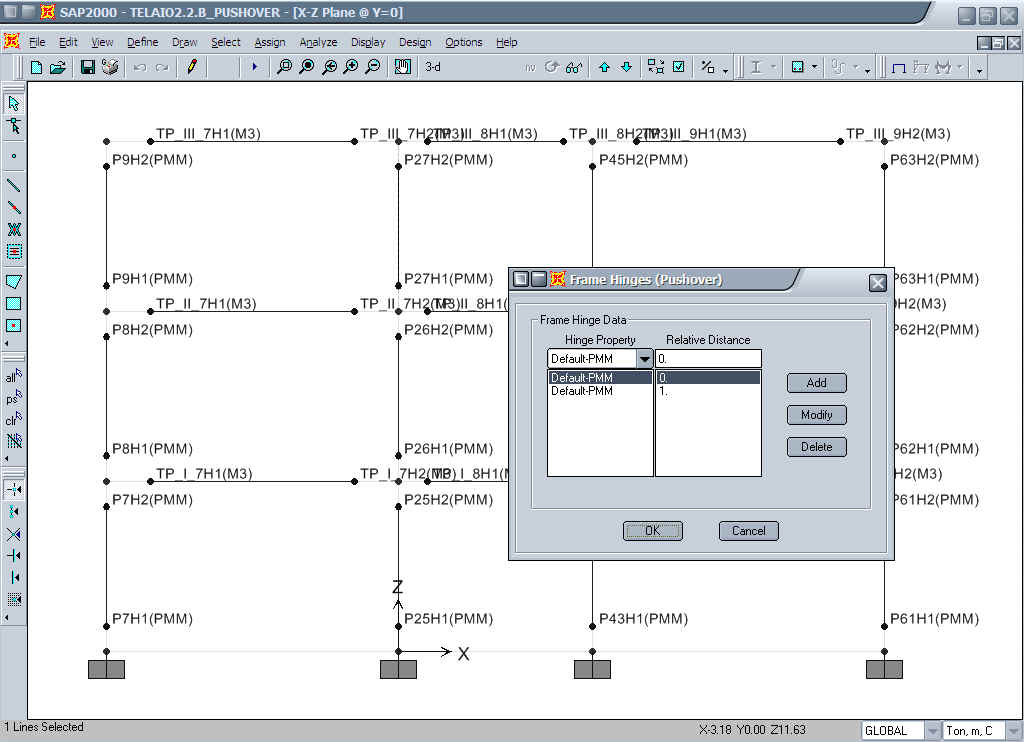
figura 5: Posizionamento delle possibili cerniere plastiche
Ogni nodo controllato sui Pilastri sarà assegnato come Cerniera Plastica di tipo PMM, nella quale l'entrata nel campo plastico sarà dovuta al raggiungimento delle caratteristiche di sollecitazioni tali da lambire il dominio di interazione PMM (Sforzo normale - Momento flettente asse I, Momento flettente asse II), mentre nelle travi verranno assegnate cerniere dal comportamento a solo momento flettente.
Si fa notare che alla struttura sono state passate presunte cerniere plastiche, fissandone il posizionamento e scegliendo una determinata legge. Nessun parametro è stato calcolato inerentemente alle caratteristiche di resistenza (intese come dominio di interazione) delle sezioni.
Naturalmente le sezioni devono essere fissate anche per quanto riguarda la loro armatura. Per questo scopo sulla struttura in esame è stato compiuto un predimensionamento tenendo in conto solo delle sollecitazioni statiche.
Oltre che il posizionamento della cerniere (presunta) è necessario stabilire il tipo di cerniera attesa:
-Flessionale pura
-Taglio
-Pressoflessione deviata
-cerniera composta.
Nell'esempio illustrato sono state passate cerniere dal comportamento a Pressoflessione deviata sui pilastri e a flessione pura sulle travi.
Per la definizione della cerniera plastica, è necessario fissare alcuni parametri caratteristici, tra i quali:
-Legge Momento-Curvautura: Questa legge è passata in forma adimensionale nella forma M/My (momento/momento di snervamento) e R/Ry (rotazione/rotazione di snervamento). In questo modo non è necessario calcolarsi il dominio di rottura della sezione al fine di ricavarsi i valori caratteristici di snervamento. Questo risulterebbe particolarmente oneroso, soprattutto tenendo conto del fatto che durante le fasi di analisi lo sforzo normale presente sui pilastri si modifica andando a modificare a sua volta i valori di momento plastico. come risulta evidente dalla figura sottostante è stato supposto un andamento incrudente. I valori passati devono essere dedotti in funzione del tipo di sezioni utilizzate. Sono presenti in letteratura numerosi casi analizzati. normalmente viene fatto riferimento a due documenti: ATC40 per le sezioni in c.a. e la FEMA 273 per le sezioni in acciaio. Lo stesso SAP2000 mette a disposizione dei valori standard ottenuti proprio da i documenti citati. I punti riportati nella schermata successiva (A,B,C,D,E) sono gli stessi individuabili nella figura 2.
-Valori da assegnare ai diversi stati limite:
-
IO - Occupazione immediata
-
LS - salvataggio delle vite
-
CP- prevenzione del collasso
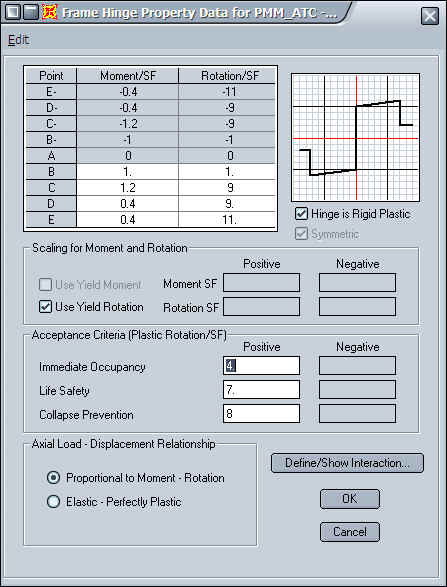
Figura 6: Caratteristiche delle cerniere plastiche utilizzate
Per effettuare una analisi di pushover è necessario condurre sulla struttura una analisi statica non lineare effettuando un controllo di spostamento.
In questo tipo di analisi la procedura di carico avviene per passi tenendo conto ad ogni passo della situazione deformata per il calcolo della matrice di rigidezza, che quindi varia ad ogni passo.
Al fine di computare correttamente i carichi verticali statici, vengono effettuate 2 analisi statiche non lineari, una denominata GRAV e l'altra denominata PUSH. Nella prima vengono attivati solo i carichi verticali. La seconda parte alla fine della prima, quindi la matrice di rigidezza al primo passo della analisi tiene conto della situazione deformativa dei carichi veritcali.
Con analisi statiche non lineari, condotte a controllo di spostamento, è possibile far tracciare la curva i pushover. Questa curva consiste nella storia di deformazioni del punto di controllo in funzione del carico di pushover applicato passo per passo.
figura 6: curva di pushover del sistema MDOF e curva del sistema SDOF equivalente.
Nella figura 6, sono visibili le seguenti curve:
-
in nero, curva di pushover del sistema "reale". La curva è quindi relativa ad un sistema a molti gradi di libertà MDOF. Questa curva è quella tracciata direttamente da SAP2000 alla fine della analisi statica non lineare denominata PUSH nell'esempio.
-
in rosso, curva di pushover scalata. Questa curva è dedotta dalla precedente dividendo ascissa e ordinata per g1, il fattore di partecipazione del primo modo. Questa curva viene presa come rappresentativa di un sistema equivalente ad un grado di libertà SDOF.
-
in blue, curva corrisponde ad una curva equivalente alla curva rossa. L'area racchiusa dalla curva blue è uguale all'area racchiusa dalla curva rossa. Questa curva è caratteristica di un sistema SDOF elastico perfettamente plastico equivalente al sistema MDOF di partenza.
Ottenuta la curva blue, curva di un sistema SDOF elastico perfettamente plastico equivalente al sistema MDOF di partenza, è possibile calcolare la rigidezza del sistema ad un grado di liberta elastoplastico. La rigidezza non è altro che la pendenza del primo tratto.
Noto il valore della rigidezza del sistema SDOF equivalente e nota la massa attivata al primo modo (M1=95.4 t) è semplice calcolare il periodo naturale del sistema.
Ottenuto il valore del periodo fondamentale è necessario entrare nello spettro di risposta elastico in termini di spostamento (ricavato direttamente dallo spettro di risposta elastico in termini di accelerazione) passato dalla ordinanza stessa in funzione del tipo di terreno, leggendolo proprio in corrispondenza del periodo trovato per ottenere:
dal valore SDe(T) (Spettro di risposta elastico in termini di spostamento) si potrà determinare infine la capacità di spostamento richiesta al sistema:
Il valore della capacità richiesta di spostamento serve per indicare il limite di verifica all'interno della curva di pushover. Nella figura 6 è rappresentato dal segmento verticale di colore nero.
La verifica consisterà quindi nel controllare il danneggiamento nel tratto di curva di pushover compreso tra l'origine e il valore di d*max.
A questo scopo è necessario visualizzare la tabella successiva:
In questa tabella, sono stati riportati i passi della analisi non lineare statica.
Ogni passo riportato segna un incremento del taglio alla base (ripartito secondo la distribuzione di forze considerata) e lo spostamento del punto di controllo ottenuto al passo.
I valori numerici riportati nelle colonne adiacenti, corrispondono al numero di cerniere plastiche attivabili nel modello e le colonne ne rappresentano lo stato di danneggiamento.
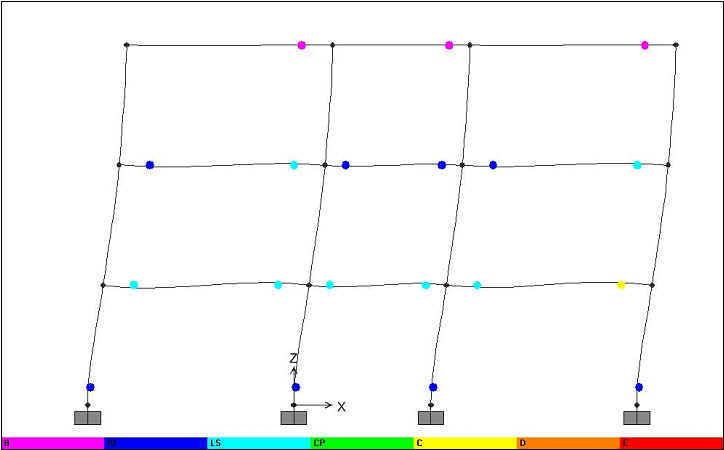
Ogni passo può essere rappresentato separatamente con l'indicazione di quali cerniere plastiche si sono attivate e a quale deformazione plastica sono soggette. Si riportano di seguito alcuni passi della analisi.
...
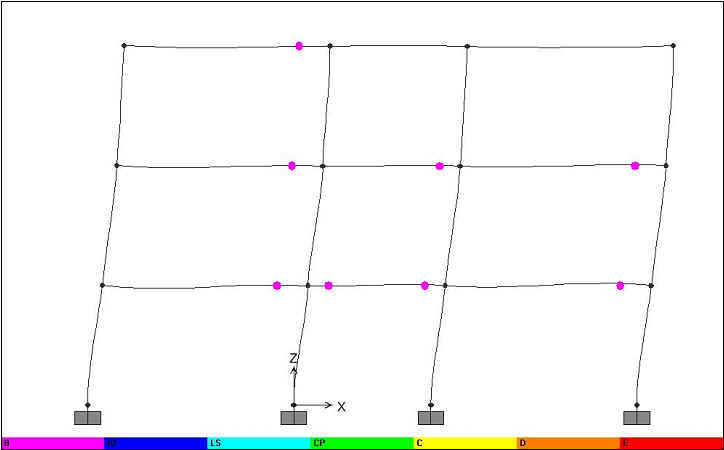
...
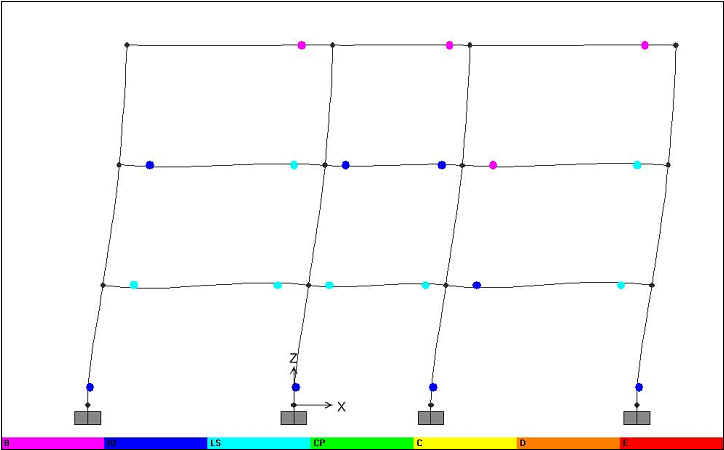
...
La verifica termina positivamente se nel tratto della curva di pushover compreso tra l'origine e il valore d*max non si sono superate le condizioni di danneggiamento imposte dallo stato limite considerato.
Contatti
Csi
Italia srl
(distributore per l’ Italia dei codici di calcolo prodotti dalla CSi).
Consulenza
di modellazione strutturale, assistenza e corsi per l’uso
dei programmi
SAP2000 ed ETABS.
Galleria San Marco, 4, 33170 Pordenone, tel.
043428465
Ing.
Leonardo Bandini

